AUTONOMOUS UNMANNED SURFACE VEHICLE SYSTEM FOR BATHYMETRIC MEASUREMENTS: SENIOR PROJECT DESIGN

Path Plan Subsystem Tests
1. GPS ACCURACY TEST
Objective:
Test the Accuracy of our GPS Module and see if it is within 20 meters.
Procedure:
Power up Pixhawk and peripherals and connect it to Mission Planner. View displayed GPS values and compare to values from Google GPS through 10 data points around campus.
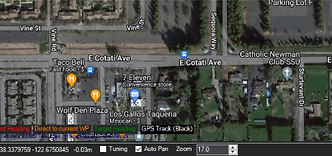
GPS coordinates via our Path Plan Software (Mission Planner)

GPS coordinates via Google Maps
GPS ACCURACY TEST RESULTS

The 10 locations we conducted our tests in

The discrepancies between the Google GPS vs our flight controller's GPS module
Results: After conducting 10 tests, the largest discrepancy was 8.35 meters. Therefore, the results was a pass due to all the differences being within 20 meters.
2. WAYPOINT ACCURACY TEST
Objective:
Test the accuracy of each programmed waypoint of our USV in route.
Procedure:
1. Power up USV and check if all preflight requirements are met(Battery, GPS, Radio, Telemetry).
2. Deploy boat in predetermined location, and start path to waypoint.
3. Measure the distance from the desired location of waypoint to the closest point the USV reached that location.

The path plan software showcasing our boat waypoint location.
WAYPOINT ACCURACY TEST RESULTS

The image showcases the results of our path plan waypoint test, where only 3 waypoints were captured, with the rest venturing off path, and therefore not being documented.
