top of page
AUTONOMOUS UNMANNED SURFACE VEHICLE SYSTEM FOR BATHYMETRIC MEASUREMENTS: SENIOR PROJECT DESIGN

AUTONOMOUS UNMANNED SURFACE VEHICLE SYSTEM FOR BATHYMETRIC MEASUREMENTS

AUTONOMOUS UNMANNED SURFACE VEHICLE SYSTEM FOR BATHYMETRIC MEASUREMENTS
Our project is focused on measuring bathymetric data in the Russian River Estuary. By collecting this information, we can provide assistance for others to better understand the river's ecosystem.
The problem we are exploring addresses local researchers who want to obtain bathymetry (depth), salinity, and temperature measurements within the Russian River estuary to analyze the river ecosystem. This leads them to feel exhausted and frustrated due to current equipment being expensive and having to collect data manually. Thus, we are enabling an autonomous and inexpensive USV to accurately collect data and visualize in wide-coverage areas.

Problem Statement
Value Proposition
Our Unmanned Surface Vehicle (USV) helps local Russian River researchers who want to measure depth, salinity, and temperature in estuaries by avoiding expensive equipment and manual work. Thus, enabling an autonomous and inexpensive USV to accurately collect data and visualize in wide-coverage areas.
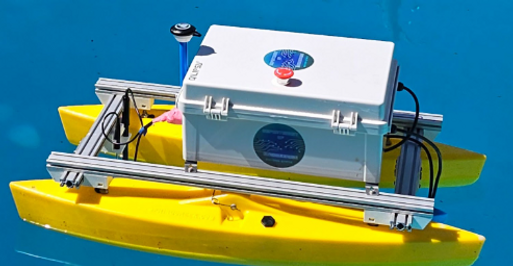
Unmanned Surface Vehicle for Bathymetric Measurements
bottom of page